Biomimetic and Neuro-robotics
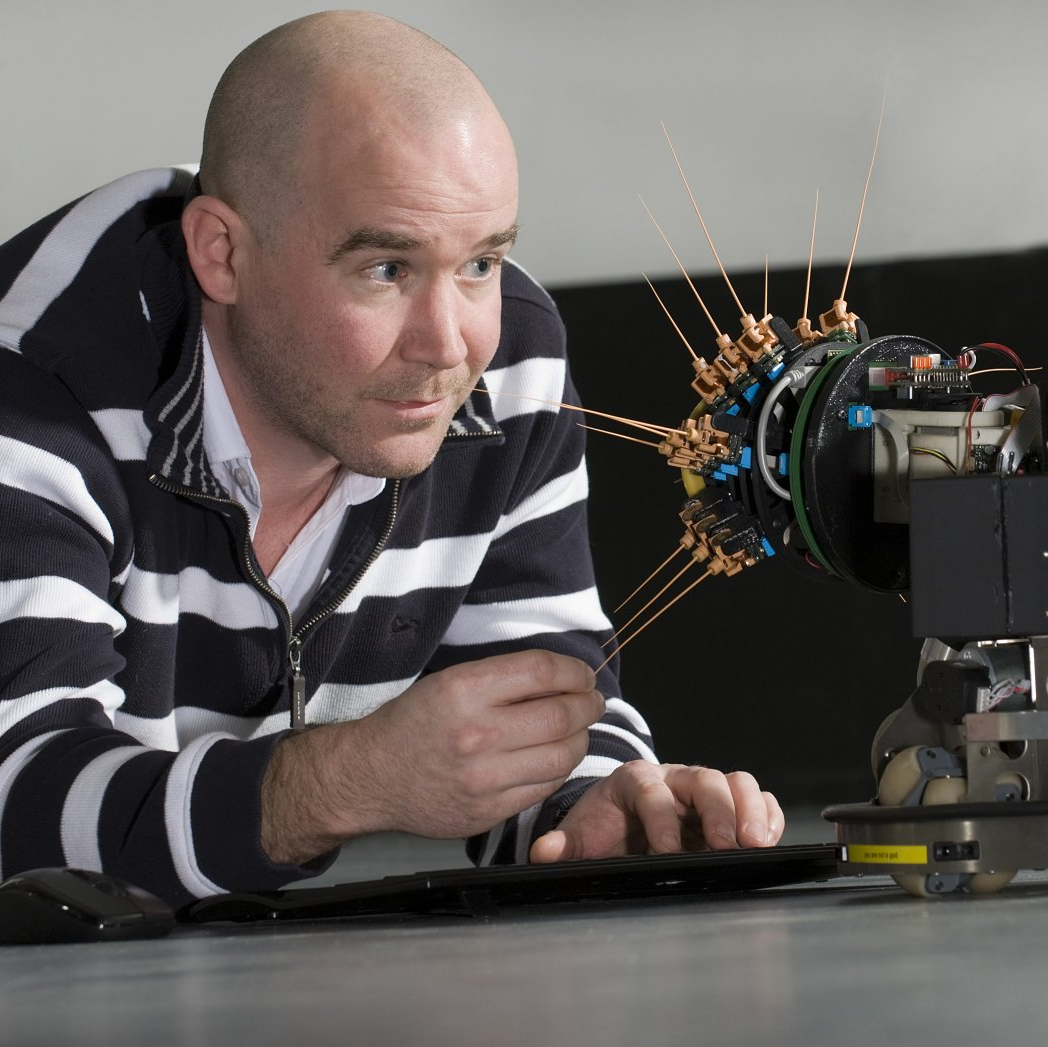
Biomimetic robotics research combines our curiosity of how biological systems work with our desire to solve hard engineering problems.
Through the development of embodied physical models of biological sensori-motor systems, that can be embedded into physical environments, we can test current hypotheses of biological functionality and evaluate possible directions for technical exploitation. Similarly, neuro-robotics refers to biomimetic robotic systems developed for revealing or exploiting the computational principals of neural systems.
Research Projects
Meet the Biomimetic and Neuro-robotics Team