Aerial RobotsResearch Lead: Prof. Arthur Richards
Research into intelligent aircraft, including autonomous Micro Air Vehicles, specializing in their guidance and control.

Assistive RoboticsResearch Lead: Dr. Marcela Munera
Research into interactive assistive robots and smart sensor systems to realise person-focussed innovative assistive care solutions for supporting independent living.

Environmental Robotics and Self-sustainable Technologies
Research Lead: Dr Jonathan Winfield, Dr Jiseon You, Dr Iwona Gajda
By transforming waste into valuable resources, energy, and sensing capabilities, we aim to create self-sustaining systems that contribute to a cleaner, greener, and more sustainable future for all.

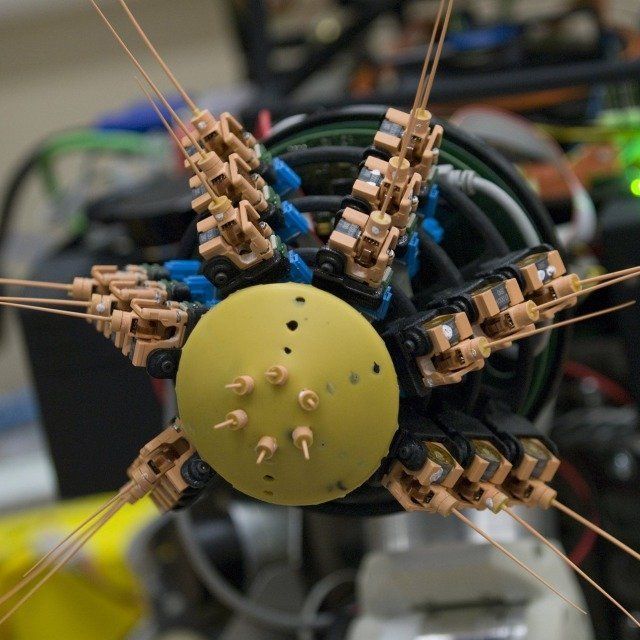
Biomimetic and Neuro-roboticsResearch Lead: Dr. Martin Pearson
Developing robots that can operate in challenging environments, beyond the limitations of conventional sensory devices.
Connected Autonomous VehiclesResearch Lead: Prof. Tony Pipe
Research and Development in all aspects of Connected Autonomous Vehicles.

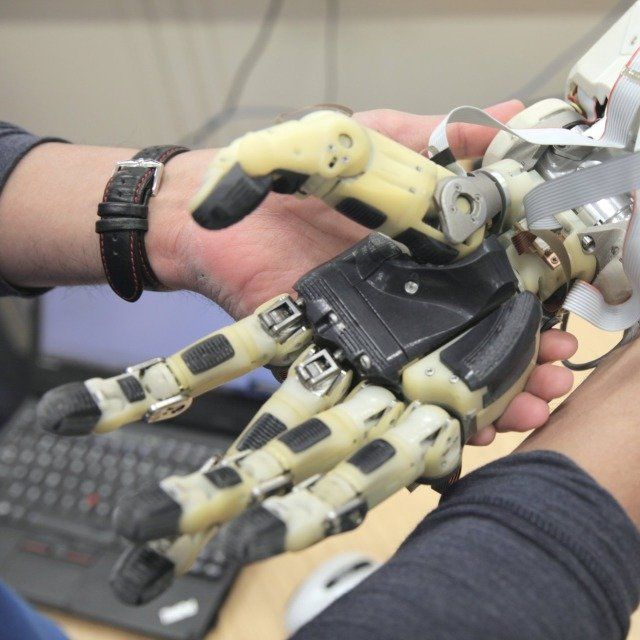
Dexterous Robotics
Research Lead: Prof. Nathan Lepora
A collaboration between 5 research leads on the application of robotics and AI to advanced manual dexterity with robotic hands and manipulators.
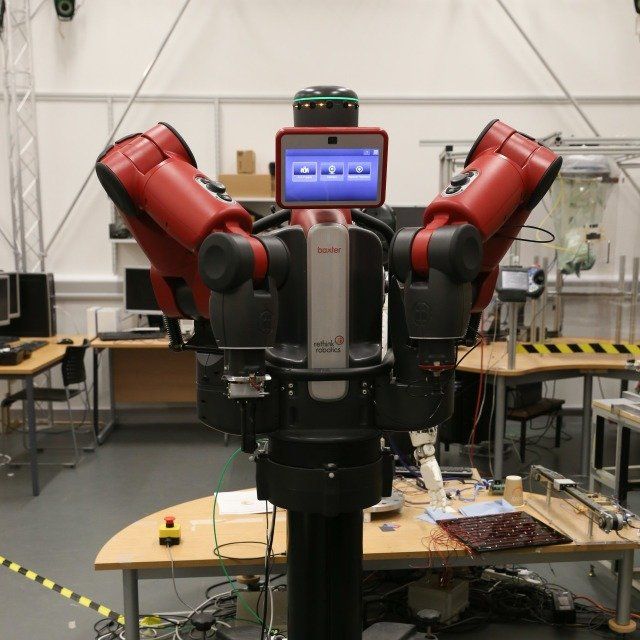
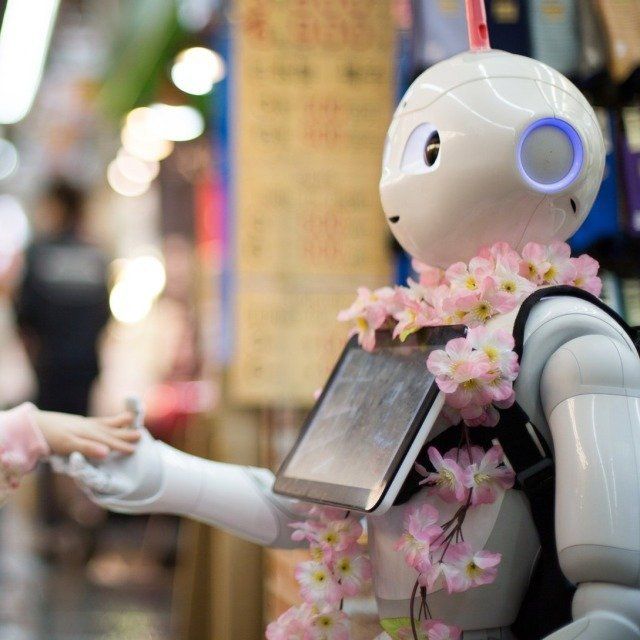
Embodied Cognition for Human-Robot InteractionsResearch Lead: Prof. Manuel Giuliani
Research on natural and socially acceptable human-robot interaction.

Medical Robotics
Research Lead: Dr. Antonia Tzemanaki
Robotic technology is able to provide precise and accurate sensing and movement capabilities, thus improving patient and surgeon experience.
Research Lead: Prof. Tony Pipe
Research and Development in all aspects of Robotics for Hazardous Environments and Autonomous System Support.

Ethical & Sustainable Futures
Research Lead: Prof. Matthew Studley
Developing principles and values that underpin the development of robotics and autonomous systems to meet sustainable futures.
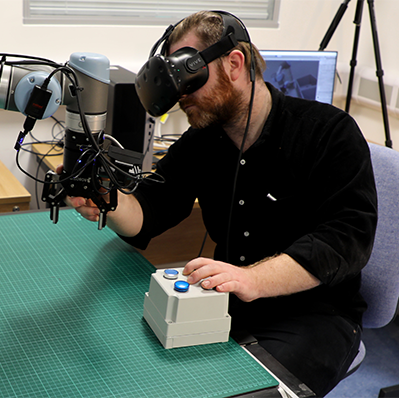
Robot TeleoperationResearch Lead: Prof. Chenguang Yang
Extends human capacities to explore and to manipulate at remote place.
Robot VisionResearch Leads: Prof. Majid Mirmehdi & Prof. Melvyn Smith
Developing Robots that are able to view, analyse what they see and make decisions in response to instructions by humans.

Safe Human Robot InteractionResearch Lead: Prof. Manuel Giuliani
Investigating the aspect of physical and behavioural safety, to enable safe Human Robot Interaction, thus ensuring a robot is capable of performing cooperative tasks with humans.
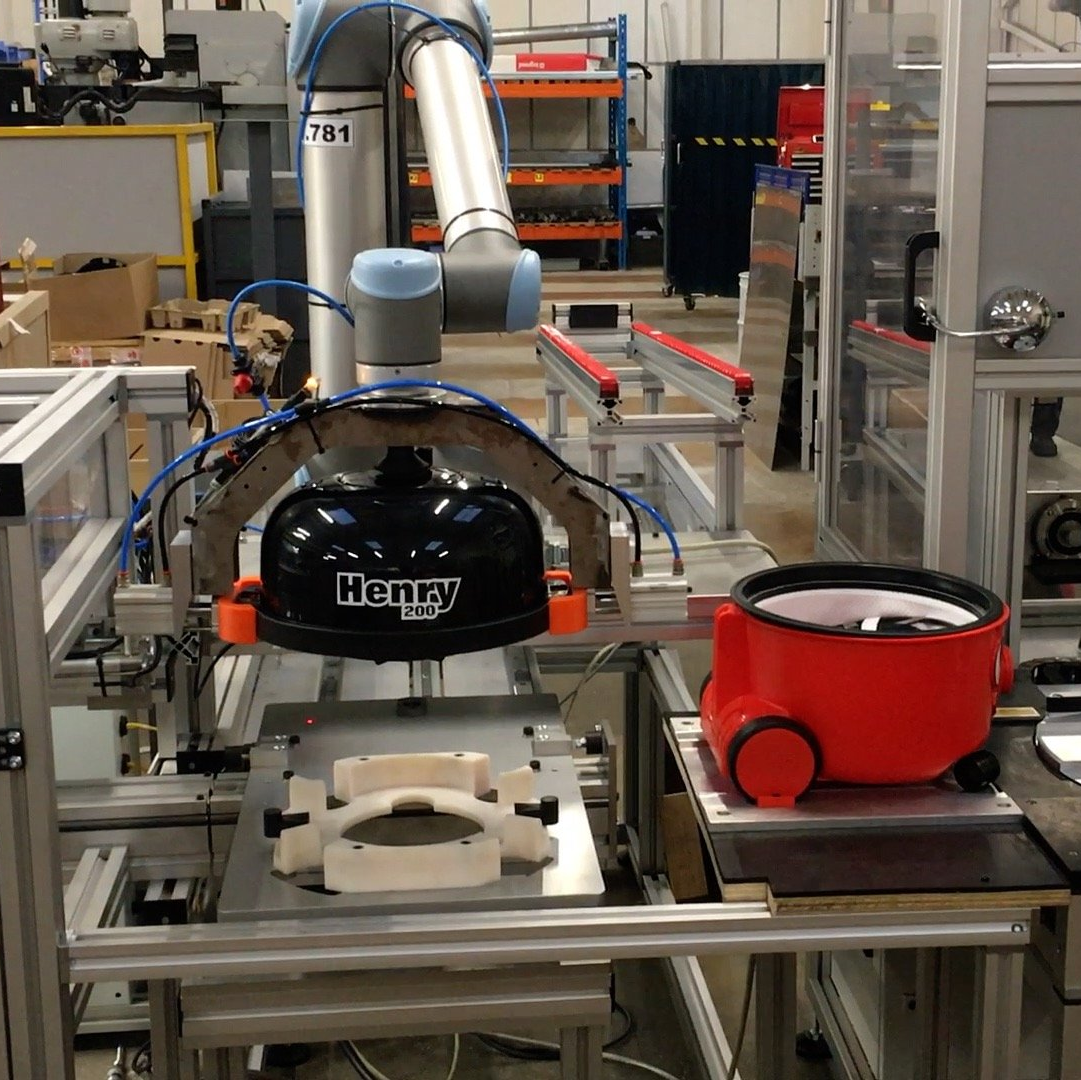
Smart AutomationResearch Lead: Assoc. Prof. Farid Dailami
Research into the next generation of advanced robotics engineering systems. Robots that can make human like decisions whilst carrying out manufacturing process.
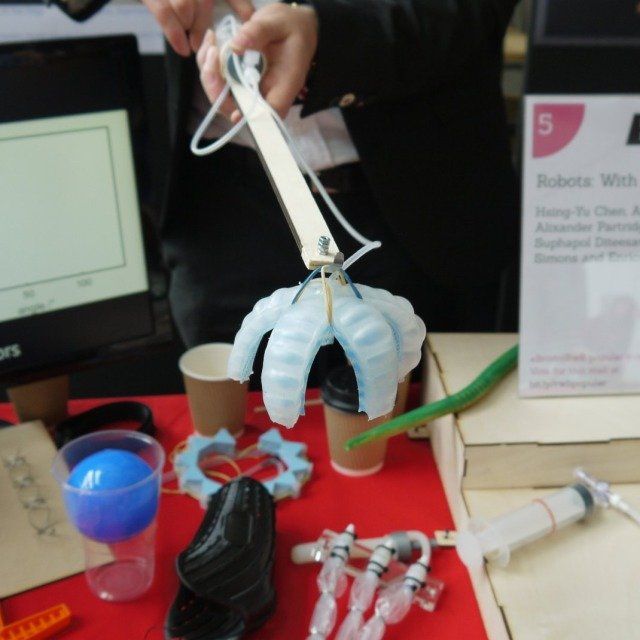
Soft RoboticsResearch Lead: Prof. Jonathan Rossiter
Soft robotics seeks to make robots that are soft, flexible and compliant, just like biological organisms.
Swarm Robotics
Research Lead: Dr. Sabine Hauert
A combination of environmental, social and internal cues could result at the group level in components believed to be important in the emergence of self-organised behaviour.

Verification and Validation for Safety in RobotsResearch Lead: Dr. Kerstin Eder
Investigating all aspects of safety for verification and validation purposes and to enable safe Human Robot Interaction in cooperative tasks.