Soft Robotics
Soft robotics seeks to make robots that are soft, flexible and compliant, just like biological organisms.
Research Lead: Prof. Jonathan Rossiter
Contact the team here
Why Soft Robotics?
Soft robotics seeks to release robots from the constraints of hard materials such as metal and plastic and develop artificial muscles and organs more analogous to biological systems.
Robots have traditionally been made from hard materials such as metal and plastic. They have been driven by motors and other heavy electro-mechanical actuators. These robots are more like machines than biological organisms.
Soft robotics on the other hand seeks to make robots that are soft, flexible and compliant, just like biological organisms. The ‘body’ of a soft robot is soft like natural tissue. A soft robot is driven not by heavy motors but by soft artificial muscles.
The energy store in a soft robot much more closely resembles a biological ‘stomach’ than a conventional electrical battery. Sensors and transducers in a soft robot exploit the softness of the body, enabling new sensing modalities that mimic biological sensor systems. A soft robot is much more like an artificial organism than a machine.
Artificial Octopus for Emergency Rescue
An example of a soft robot is an artificial octopus which searches for victims under collapsed buildings following an earthquake. The robot can deform itself to squeeze into small gaps and ‘worm’ itself into the structure. When it finds a casualty trapped in the debris it can exert localised forces to create an air pocket.
Soft robotics is a major research theme at BRL that also draws upon research in a wide range of complimentary fields. For example:
Artificial muscles
– soft electro-active and chemo-active actuators
Artificial stomach
– bio-inspired energy supplies
Soft sensors
– tactile sensors and active skins
Soft brain
– neuro-control of soft actuators and sensors
Applications include artificial autonomous organisms that are self-sufficient and self-repairing, soft rescue robots, robots that interact with humans, medical robotics and devices, morphing materials and structures for engineering.
Soft Robotics Projects (Current)
The Right Trousers

The Right Trousers is an EPSRC funded research project which aims to develop new soft robotic technologies that will help older people and people with disabilities to live more independently and with greater quality of life. It is a collaboration between six UK research institutes.
Unlike conventional robotics, Soft robotics are new compliant active materials and structures that work in harmony with the human body. Instead of using motors, metals and plastics soft robotics employs smart materials that bend, twist or contract when electrically stimulated. These ‘artificial muscles’ can replace motors and can be used to restore mobility and physical functionality.
The soft robotic technology could help vulnerable people avoid falls by supporting them whilst walking, give people added bionic strength to move between sitting and standing positions and help people climb stairs.
For more information, please visit The Right Trousers
website.
Energy Efficient Dielectric Elastomer Actuators for Artificial Muscles
We aim to develop ‘artificial muscles’ for robots using dielectric elastomer actuators.
These actuators are made from soft polymers coated with compliant electrodes and are actuated by placing a voltage across the electrodes. Soft structures can achieve complex movements and are more adaptable than traditional rigid arrangements.
Energy Efficiency
Another benefit of these actuators is their use of energy. Although operated at high voltages the current they use is very small, resulting in low energy consumption.
Energy efficiency is a large obstacle in the path to developing robots that can achieve everything we would like of them. Therefore this project additionally seeks to improve actuator efficiency by employing charge recovery. The basic idea is to recycle the energy from one actuator by transferring it to another and using it again. This should help make dielectric elastomers even more attractive when it comes to energy efficiency.
Ecobot
This project also has links with the Ecobot project. The low energy technologies go hand in hand, as conventional actuators would drain a large amount of the generated energy.
We are hoping to develop actuated structures such as fluid delivery tubes, pumps and fuel cells that could be used on board the robot as part of its digestive system.
Further information here.
Multi-Segment Ionic Polymer Metal Composite (IPMC) Soft Robotics
Ionic polymer metal composites are electro-active polymer actuators, or artificial muscles, which bend in response to a low voltage stimulus.
This project is investigating the fabrication and exploitation of these composite materials as bio-mimetic swimming robots and as locomotion and water transport mechanisms. These robotic structures range in size from 10s of cm to under 10s of micrometers.
Swimming Robots
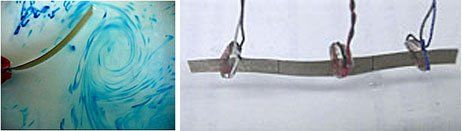
The image on the left shows fluid control and measurement of a single segment actuator. The image on the right is a three segment polymer snake that makes up a swimming robot.
Printing Robots
This project is developing novel methods for printing complete robotics in three dimensions.
Three dimensional printing
Using state-of-the-art 3d printing technologies and a laminated electro-active polymer structure we can print three-dimensional artificial muscles. This ability frees us from conventional design constraints.
The ultimate goal is to print complete artificial organisms and soft devices including artificial muscles, soft sensors and energy conversion units (artificial stomachs).

The image above displays a complete artificial muscle unit - both rigid and soft components were 3d printed.
Soft Robotics News
The Right Trousers Gets a Special Visit
07 December 2018

Meet the Soft Robotics Team