Aerial Robotics
Research into intelligent aircraft, including autonomous Micro Air Vehicles, specializing in their guidance and control.
We're trying to make the most of robots that fly. We're studying a range of challenges, from the fundamentals of giving robots the intelligence to fly well, to their integration and exploitation for novel applications.
The Challenges
Future aerial robots have to deal more intelligently with uncertainty. For example, flying in a city exposes you to unpredictable, turbulent air flow, which is particularly troublesome for very small aircraft like Micro Air Vehicles (MAVs). If you're flying indoors to survey a damaged building, say, you have to deal with unexpected obstacles. In both scenarios, you've probably lost your GPS reception, so the aircraft needs to track its position and surroundings using its own on-board sensors. And, of course, all the computers and sensors have to be lightweight so they fit on the aircraft.
Technologies
To tackle these challenges, we bring to bear a range of technologies:
- Control systems, including robust and fault tolerant control
- Motion planning, trajectory optimization and their inclusion in predictive control
- Flight dynamics modelling and simulation
- Bio-inspired approaches from the study of bird flight
- Computer vision, especially embedded systems, SLAM and intelligent exploitation of sensors
- Systems integration, bringing all these things together to deliver a useful capability
Current Projects
We collaborate with a range of companies and researchers to investigate novel uses for aerial robots.
CASCADE(Complex Autonomous aircraft Systems Configuration, Analysis and Design Exploratory)
The goal of CASCADE is to accelerate the exploitation of aerial robotics across a wide range of science and industry applications. Through fundamental research and case studies, we will advance the understanding and technologies required to allow routine operation of advanced aerial robotic systems.
Bio-Inspired Flight Lab
The Bio-Inspired Flight Lab led by Dr Shane Windsor investigates aerodynamic, sensing and control aspects of animal flight and how we can use bio-inspiration to improve engineered technologies, particularly in the area of small scale unmanned air vehicles (UAVs).
In the lab covers a wide range of areas including:
- Bird flight aerodynamics, stability and control
- Bird inspired guidance
- Bio-inspired UAV flight control
- Morphing wing aerodynamics and control
Our research is inherently multidisciplinary, using techniques from both aerospace engineering and biology to study animal flight and to develop new technologies based on understanding the principles involved with biological systems. We use a range of different experimental, analytical and numerical approaches including:
- Video analysis of animal behaviour
- GPS tracking
- Experimental wind measurement
- Wind tunnel measurements
- Computational fluid dynamics (CFD)
- Numerical control system modelling
An Integrated Vision and Control Architecture for Agile Robotic Exploration
Autonomous robots, capable of independent and intelligent navigation through unknown environments, have the potential to significantly increase human safety and security. They could replace people in potentially hazardous tasks, for instance search and rescue operations in disaster zones, or surveys of nuclear/chemical installations. Vision is one of the primary senses that can enable this capability, however, visual information processing is notoriously difficult, especially at speeds required for fast moving robots, and in particular where low weight, power dissipation and cost of the system are of concern. Conventional hardware and algorithms are not up to the task. The proposal here is to tightly integrate novel sensing and processing hardware, together with vision, navigation and control algorithms, to enable the next generation of autonomous robots.
Flying with Vision
This PhD project is looking at the best shapes for Micro Air Vehicles (MAVs) to fly, such that they are able to navigate accurately using only their onboard cameras.
Undergraduate Research Projects
A selection of projects are being undertaken, including: cooperative lifting by multiple rotorcraft; aerobatics with machine learning; and using whiskers for sensing obstacles in cluttered environments.
Aerial Robotics News
CASCADE
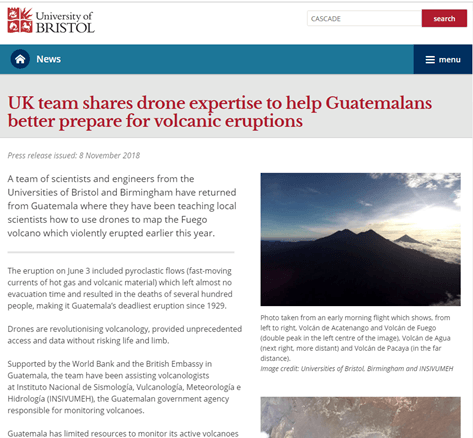
Press Release
Issue date: 08 November 2018
Meet the Aerial Robots Team