Robot Teleoperation
Extends human capacities to explore and to manipulate at remote place.
As the combination of a local human operator and a remote robot, the telerobot system could merge the intelligence of both robot and operator to achieve optimal performance.
The Challenges
The Robot Teleoperation group pursues objectives that enhance the following abilities for telerobot systems:
- Impressiveness – providing deep immersive user experience to operators through multimodal sensory feedback
- Personalisation – adapting telerobot control system to best fits different operators' motor behaviours
- Versatility – performing in different environments for various tasks with a universal human friendly interface
Principal Projects
Learn to learn human learning process from teleoperated demonstrations(L3TD)
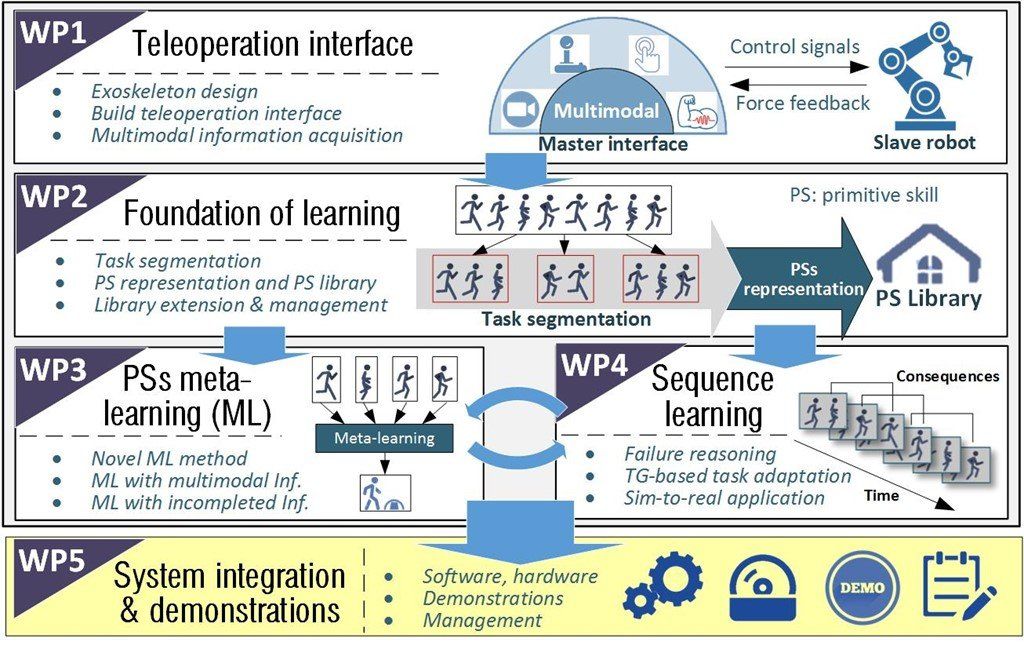
The EU-funded L3TD project aims to propose a robot skill learning framework based on the human learning process to achieve humanlike skill learning characteristics.
The project will equip a teleoperated interface with multi-sensors and a special exoskeleton to minimise information difference between humans and robots, explore new theories of primitive skill (PS) learning and PS-based task graph learning, learn and generalise PS to achieve failure reasoning, and adaptation to zero and few-shot tasks.
Further information about the project can be found here: https://cordis.europa.eu/project/id/101030691
Collaborative Robotics for Flexible Manufacturing
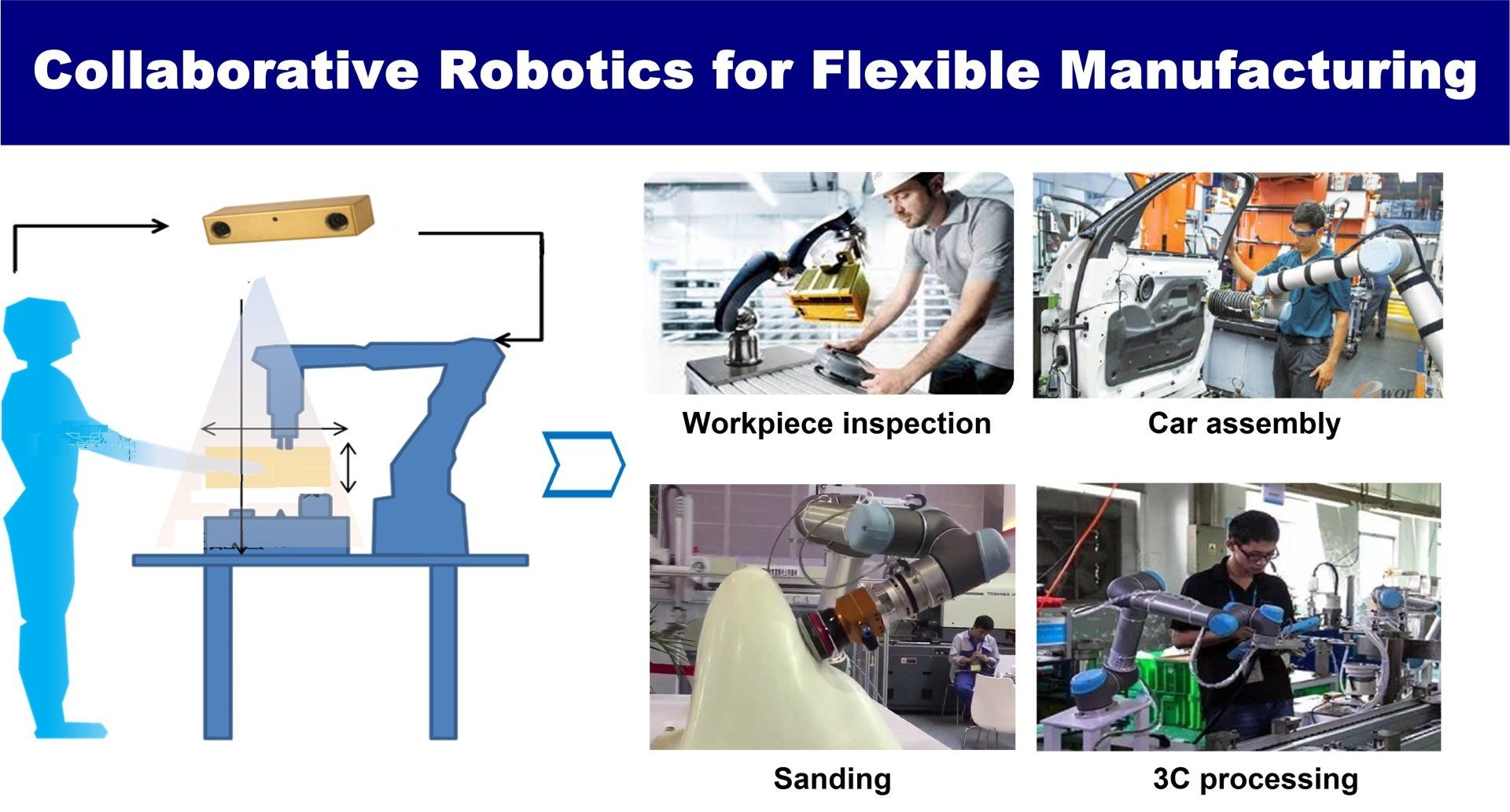
This EPSRC-funded project aims to develop software and hardware toolkits that enhance efficiency, reduce costs and facilitate application of industrial robots. To achieve this, two key approaches will be investigated:
Demonstrable
- which develops a new skill transfer interface to teach the robots through body posture, hand gesture and voice commands and enables the skill generalization mechanism for robots to perform new tasks without additional demonstration.
Collaborative
- to deliver an intelligent control system for cobots to achieve optimal human-robot cooperation through a reliable and efficient gesture/posture/voice based communication channel, so that a human's flexibility and creativity can be efficiently integrated with a robot's accuracy and repeatability.
Versatile and Dexterous Robot Control
This EPSRC-funded project aims to develop human-like adaptive control techniques to provide versatile and dexterous assistance to humans. In particular, the project enables robots to offer personalized assistance to different human users according to their motion patterns.
It creates new knowledge on robot control and assistance, i.e., improve robot control performance in terms of dexterity and versatility, and develops a "from human, for human" control design approach to optimize and to personalize the assistance robots can provide according to user experience.
Robot Teleoperation News
Meet the Robot Teleoperation Team