A checklist for safe robot swarms
Edmund R Hunt & Sabine Hauert • 4 August 2020
A Checklist for Safe Robot Swarms
As robot swarms move from the laboratory to real-world applications, a routine checklist of questions could help ensure their safe operation.
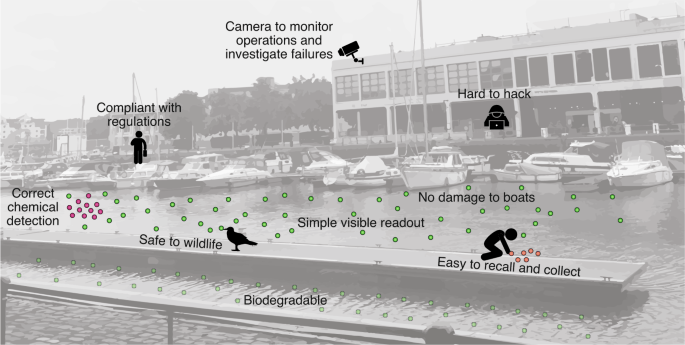
Robot swarms promise to tackle problems ranging from food production and natural disaster response to logistics and space exploration1–4. As swarms are deployed outside the laboratory in real-world applications, we have a unique opportunity to engineer them to be safe from the get-go. Safe for the public, safe for the environment and, indeed, safe for themselves. This will help build public confidence in their use, and counter hyped or negative narratives about swarms in media and science fiction. Designing safe swarms is also challenging, as the main benefits of swarms — namely their scalability, robustness and emergent properties — arise from self-organisation, a concept rarely used in engineering.
Previous research has identified certain challenges for the deployment of safe robot swarms, particularly in the areas of swarm agent fault tolerance 6–9, human–swarm interaction 10 and swarm security11–15, but limited consideration has been given to systematic assessment of swarm safety. As a starting point, we propose a preliminary ‘safe swarm checklist’ with ten questions that should be answered satisfactorily by engineers before a swarm can be deployed in the real world, where real costs are at stake. Highlighting potential risks early in the swarm design phase will allow mitigations to be introduced.