Nonlinear Control in Robotics
Would you feel confident of approaching and touching a heavy duty production assembly robot in operation? Possibly not…
Our goal is to bring future generations of humans and humanoid robots together, which requires safe interaction of humans with robots. Basic requirements are force and shock compliance to avoid injury to humans, while the robot fulfils ‘control’ tasks, i.e. the handling of a filled coffee cup.
In order to achieve this we pursue research into novel, advanced, robust, nonlinear and adaptive control methods where the practical requirements of robotic systems drive our theoretical interests in control.
Our novel control approaches allow not only for compliance but also for human-like motion, resolving the problem of link redundancy in a human fashion.
Confidence, safety and task completion
Our work has focused on three different aspects of human / robot interaction:
- Humanoid robot motion to improve confidence in the interaction;
- Compliance to guarantee safety in the event of collision;
- Task completion, ensure the robot can still perform useful tasks within the constraints of aspects 1 and 2.
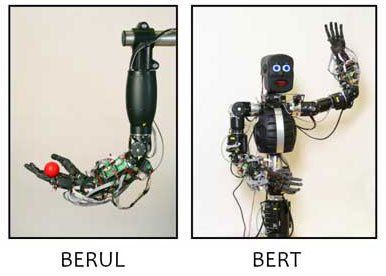
For this research we currently use two robot platforms developed by Elumotion Ltd: BERUL (Bristol Elumotion Robotic Upper Limb) and BERT (Bristol Elumotion Robotic Torso)
Projects
ANDy: Anthropomorphic natural dynamics
Designing a robot to move in a human-like way is intended to improve human-robot interaction for the next generation of robotic applications where robots are envisaged to work in close proximity to humans.
Humanoid robot dynamics
Though humanoid robots are being produced in increasing quantity and variety they are still often controlled by the same methods of their industrial counterparts, with large unpredictable movements of redundant joints.
This project aims to generate more human like motion from anthropomorphic (humanoid) robots by imposing an anatomically inspired control scheme based on human muscle location, grouping and response.
By having such a model running alongside the robot’s primary motion controller the robot constrains its motion for maximum efficiency. This produces movement trajectories that appear lifelike while still permitting the primary controller to execute useful tasks.
The control scheme is implemented in the form of a novel nonlinear controller based on a dynamic model of the robot system. This creates a general system where a practical application has been achieved through a controller grounded in theoretical mathematics.
Designing a robot to move in a human-like way is intended to improve human-robot interaction for the next generation of robotic applications where robots are envisaged to work in close proximity to humans and elements of trust and predictability are linked to efficient working and safety.
This project uses the BERUL (Bristol Elumotion Robotic Upper Limb) and BERT (Bristol Elumotion Robotic Torso) robot systems that were designed and built by Elumotion Ltd.
Meet the Nonlinear Control in Robotics Team